Building DIY CNC machines is becoming more and more popular. On the other hand, sometimes it is fairly hard to find appropriate DC servo motors.
This page describes how to convert an ordinary DC motor with permanent magnet into DC servo motor. This is possible to achieve by adding incremental quadrature encoder to an existing DC motor. You can build incremental encoder yourself.
|
DC motor |
DC motor that is used for reconstruction has diameter of 80 mm, length of about 155 mm (measured without the output shaft) and nominal voltage of 24 VDC. Maximum revolution speed of unloaded DC motor is about 2200 RPM. Appearance of disassembled motor is shown on the photograph. |
|
Rotor |
In order to place encoder on DC motor, it is required to increase length of the shaft on the right side where commutator is located (right side on photo). To do that, it is first required to drill a hole through the rotor shaft on that side. On universal lathe, a hole is drilled with diameter of 5 mm and depth of about 15 mm. Make sure that rotor is centered so that axis of drilled whole does not deviate from rotor axis. Then little shaft is jammed in drilled hole. This shaft has diameter of 5mm and length of about 60mm (shown on the right side of the photo). Off course, tolerances should be taken into account. Diameter of the little shaft should be about 0.01mm bigger than hole diameter. |
|
Motor flange |
On motor flange on the commutator side it is required to drill a hole so that little shaft can pass through it. Photo shows the cover with drilled hole that is 6 mm in diameter. After this, DC motor should be reassembled. |
|
Encoder wheel |
Now it is needed to attach incremental encoder to the added shaft. Here will be described procedure for building incremental encoder. Encoder consists of encoder wheel and electronics for shaping of the signal. The picture on the left shows one possible design of incremental encoder wheel.
|
|
Encoder wheels |
Encoder wheel is made from film that is used for press preparation. Photo shows two cut encoder wheels. |
|
Encoder wheel attached to the holder |
Encoder wheel should be placed on the holder as shown on the photo. |
|
Optocoupler TCST2103 |
The base of electronics used for signal generation consists of two optocouplers with air gap. For this purpose optocouplers used are TCST2103 featuring air gap of 3 mm, from Vishay-Telefunken manufacturer. |
|
Schematic |
|
|
Encoder PCB |
|
|
Soldered incremenatal encoder PCB |
Soldered circuit board with electronics for encoder ready to be installed. |
|
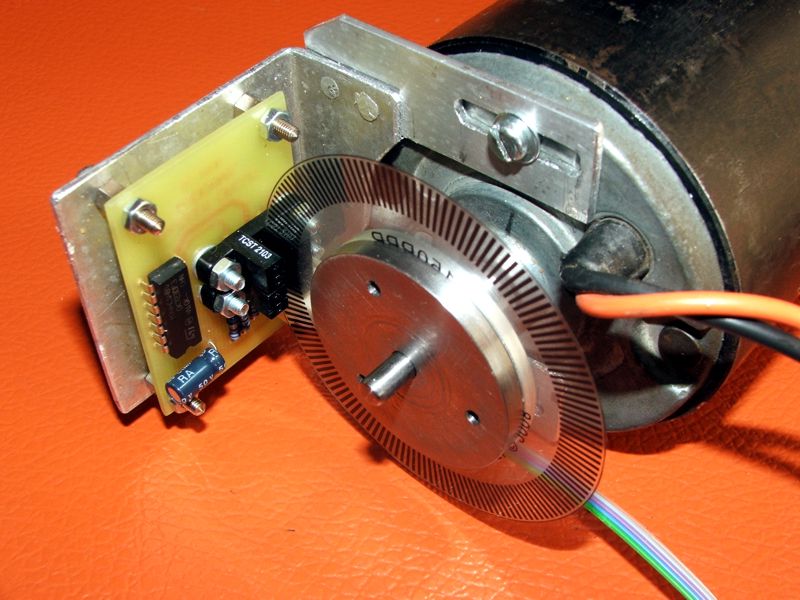
Incremental enkoder installing |
Encoder circuit board is placed to an angular holder. Only left to do is to place encoder wheel on small shaft. |
|
Assembled incremental enkoder |
Assembled encoder ready for testing. |
|
Testing of incremental encoder |
Incremental encoder was tested using DC servo drive DCS-140 and it worked on the first try. Trials have been performed with encoder wheels containing larger number of pulses per revolution (PPR). The highest resolution of encoder wheel with which this proposed board worked correctly is 150 PPR. On DC servo drive DCS-140, multiplication of resolution for incremental encoder was specified to be x4, which resulted in overall resolution of 600 PPR. To achieve higher encoder resolution it is needed to enlarge encoder wheel diameter or choose an optocoupler that supports higher resolution.
|
|
Viewing signal on oscilloscope |
Shape of the signal from incremental encoder is captured using oscilloscope. On the photo it can bee seen that ratio signal/pause is not 50-50 %. This ratio can be adjusted by changing ratio of transparent and opaque fields on the printed design for encoder wheel Phase angle between two channels of the incremental encoder can be adjusted by widening gap between optocouplers. It is needed for phase shift between two phases of incremental encoders to be near 90° which can also be verified using oscilloscope. |













We hope that proposed procedure for converting DC motor into DC servo motor, DIY work and experimentation with incremental encoder, will bring lots of pleasure that only making things yourself can provide.
Audioms Automatika doo Support team





